开云(中国)Kaiyun·官方网站这些系统时时难以即时测量速率-开云(中国)Kaiyun·官方网站
盖世汽车讯 当今机器东说念主和无东说念主机的视觉系统依赖于3D传感器,天然这些传感器功能雄壮,但却无法弥远跟上实际寰宇快速且不能展望的指引。这些系统时时难以即时测量速率,或者体积过大、资本过高,难以称心广阔使用需求。据外媒报说念,在期刊《Nature》发表的一篇论文中,科学家们推崇了他们何如耕作出一种芯片级4D成像传感器,该传感器八成在创建环境3D舆图的同期,跟踪指引物体的速率。
图片开始:期刊《Nature》
芯片上的传感器
斟酌东说念主员构建了一个焦平面阵列(FPA),这是一个由61,952个固定像素构成的物理网格,这些像素蚀刻在单个硅芯片上。每个像素齐是一个袖珍传感器,它向策划场景辐射激光并检测反射信号。
为了“感知”周围环境,来自外部光源的激光被输入到芯片中。这束光通过芯片上的光开关收罗进行路由,这些光开关循序将其导向不同的像素组。然后,每个像素使用一种称为FMCW LiDAR的期间来测量复返的信号,该信号随后被处分以详情距离和速率。在很多激光雷达系统中,一组像素发送光,另一组像素给与光,但在这里,总共像素齐同期发送和给与光,这使得系统愈加紧凑。
此外,该芯片遴荐畅通激光束而非传统传感器使用的短脉冲光。其上风在于,它八成检测光波频率的微弱变化,从而同期盘算物体的距离和速率。
同期测量距离和速率
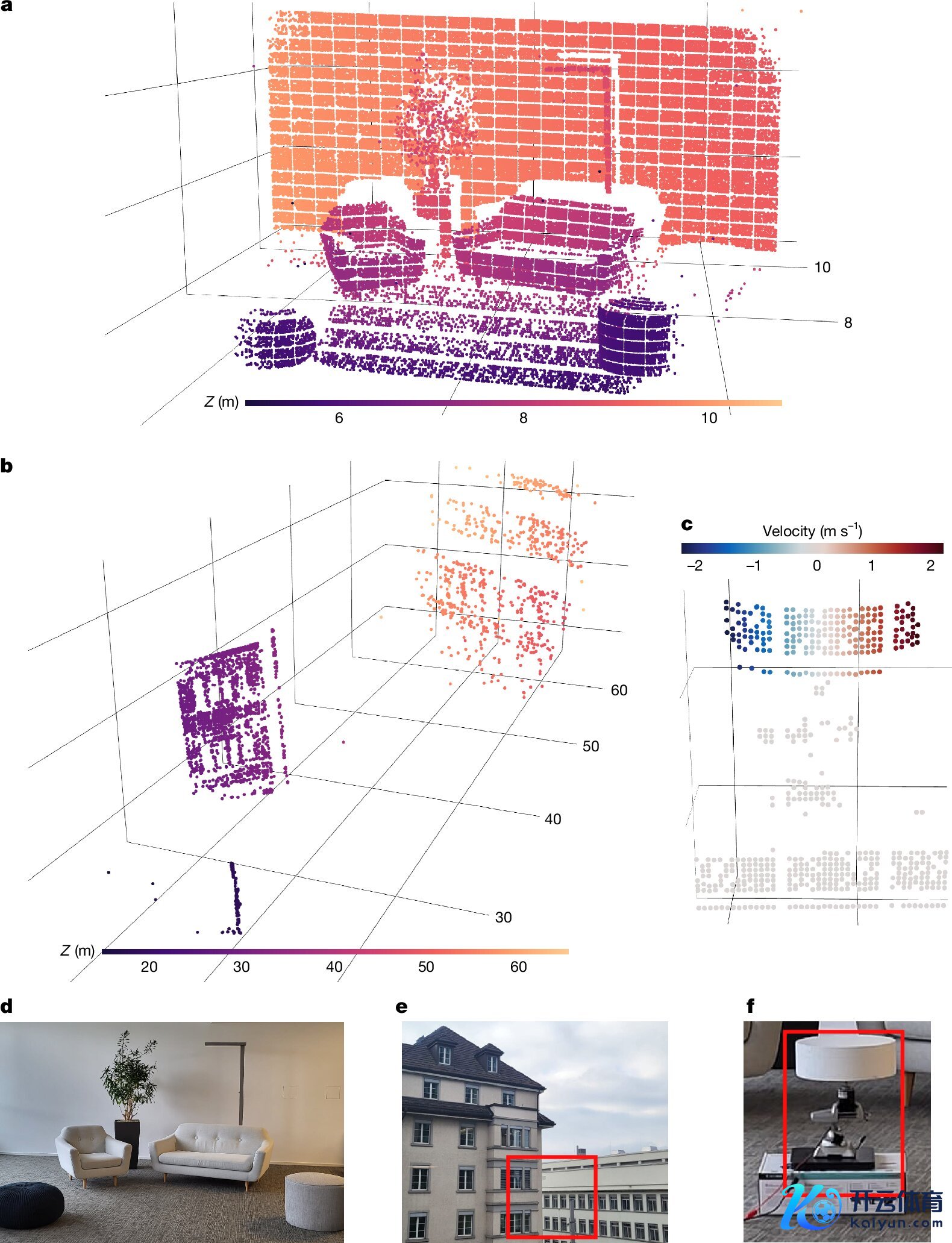
斟酌团队在多种环境下测试了芯片上的传感器,以纯属其在不同距离和指引气象下的性能。该传感器扫描场景,并将其重建为由数千个数据点构成的三维数字舆图。该系统生效绘图了6至11米范围内的室内舆图。
为了测试其探伤范围,科学家们将芯片瞄准65米外的一栋建筑物,效果涌现其性能足以捕捉到窗户和阳台等细节。他们还测试了这项翻新期间在旋转圆盘上的行使,独立即测量了圆盘的转速。
“这是初度在芯片上集成总共关联电子元件的大领域筹商焦平面阵列(FPA)的演示,从而终明晰无为行使所需的资本结构,”通信作家Remus Nicolaescu写说念。
该团队仍在对芯片进行校正,举例擢升分裂率和推广其探伤范围。一朝走出实验室,这项期间的行使范围将不仅限于机器东说念主和无东说念主机。它还有望校正数码相机开云(中国)Kaiyun·官方网站,包括手机中的录像头。